Power your marketing strategy with perfectly branded videos to drive better ROI.
Host virtual events and webinars to increase engagement and generate leads.
Inspire employees with compelling live and on-demand video experiences.
Build a site and generate income from purchases, subscriptions, and courses.
Please enable JavaScript to experience Vimeo in all of its glory.
from SimuTech Group
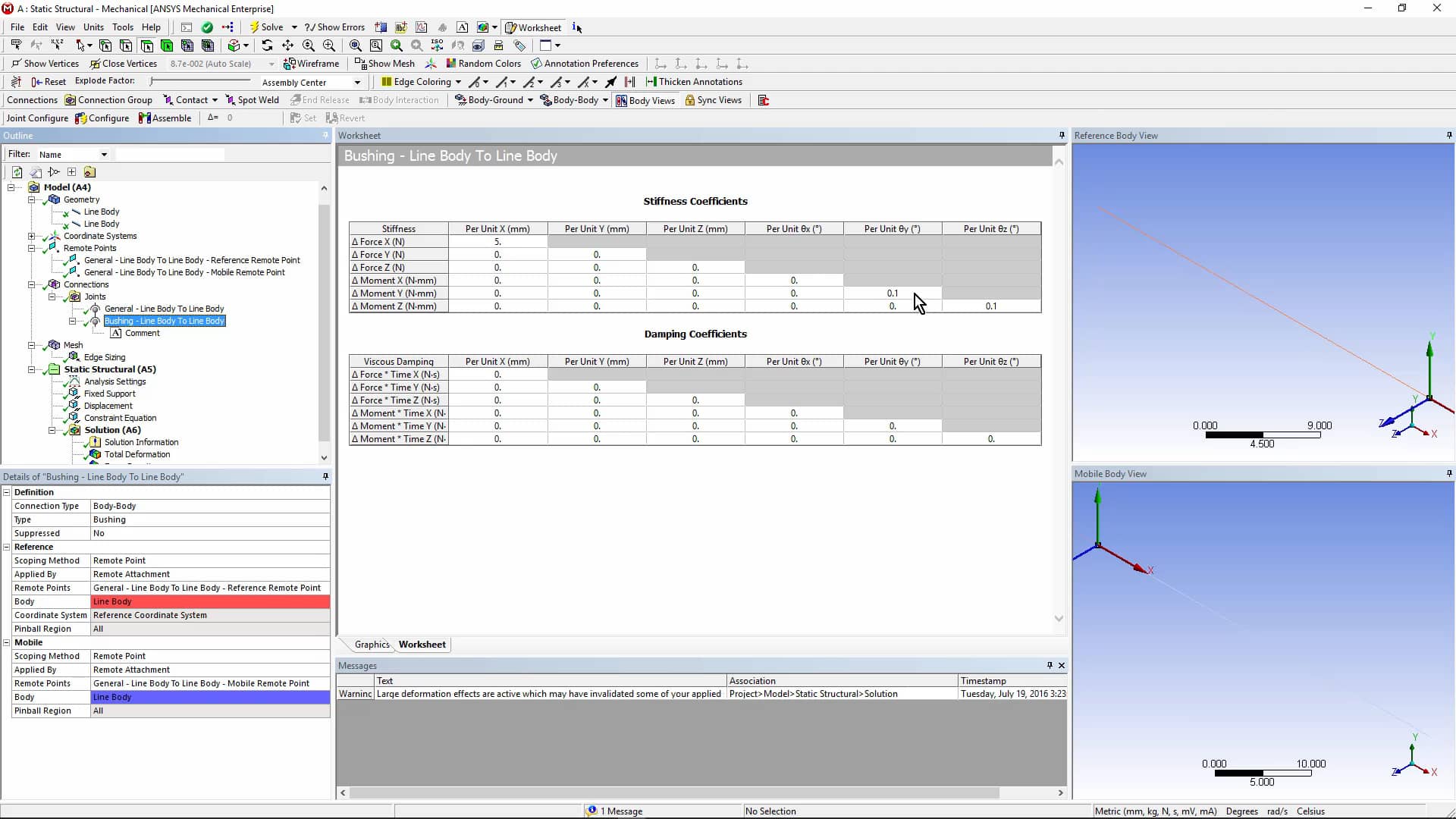
ANSYS FEA Tips & Tricks video showing the setup of a joint manipulation model.